THE FLOCK
Learn about our geese.

Goose VI
Our 'flock' of Hyperloop pods has developed in sophistication over 6 iterations of research and development. Take a look at the major features of our latest pod and the history of its development!
 keyboard_arrow_right
keyboard_arrow_rightFeatures
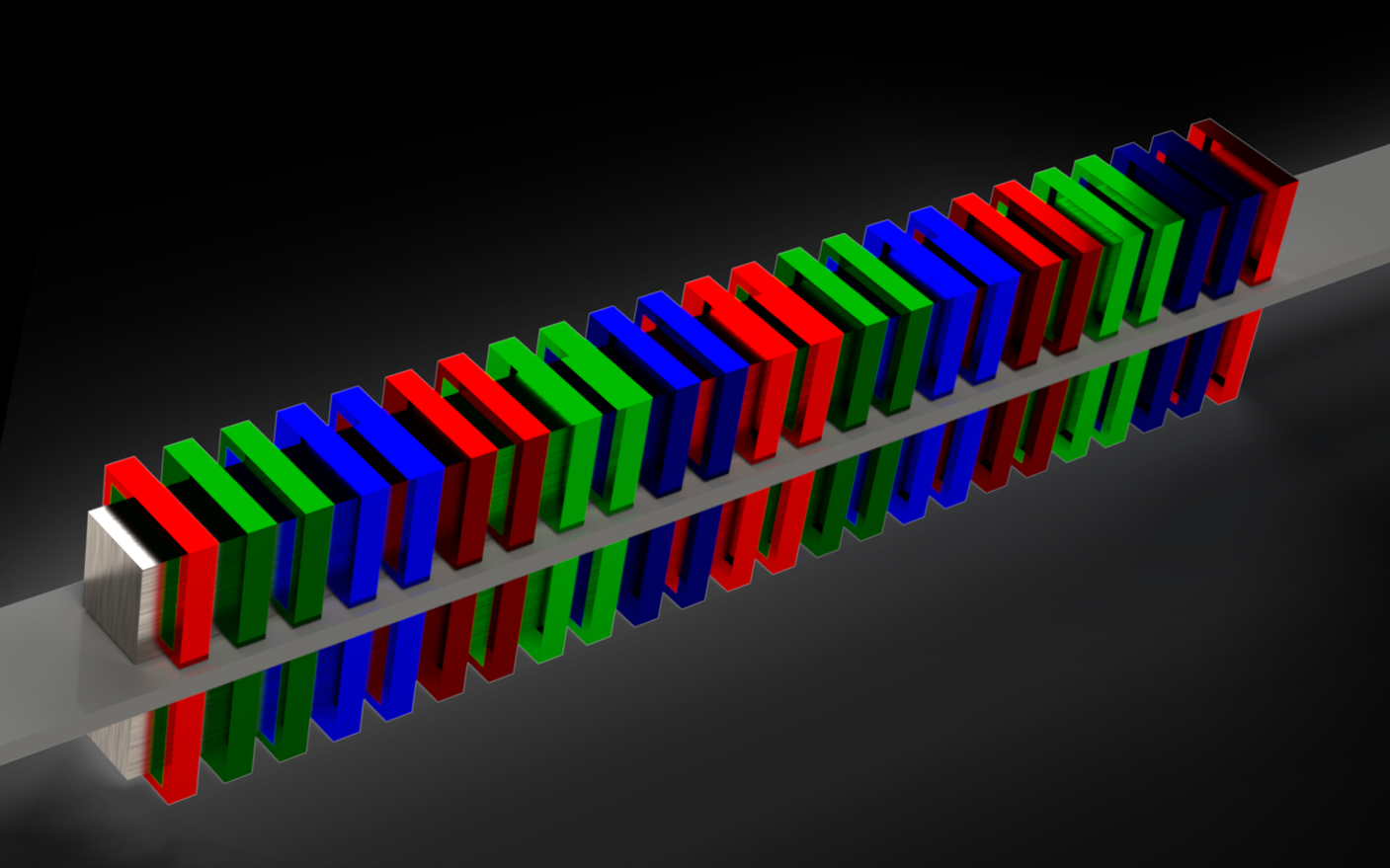
Linear Induction Motor
To scale to Hyperloop speeds, we need contactless propulsion. LIMs provide a way to levitate, stabilize, and propel, all in the same package, and they require a simple metal track with no magnets - perfect for minimizing infrastructure cost.
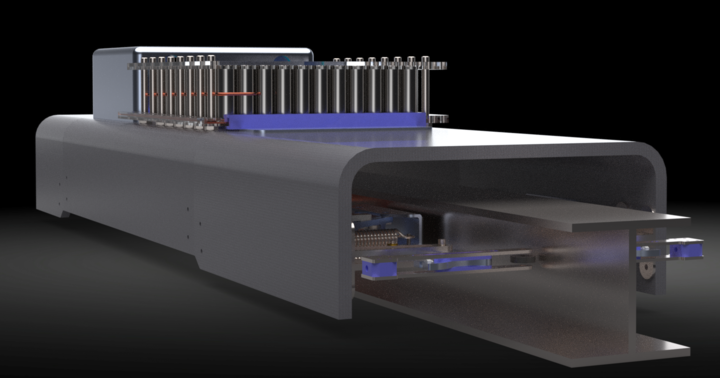
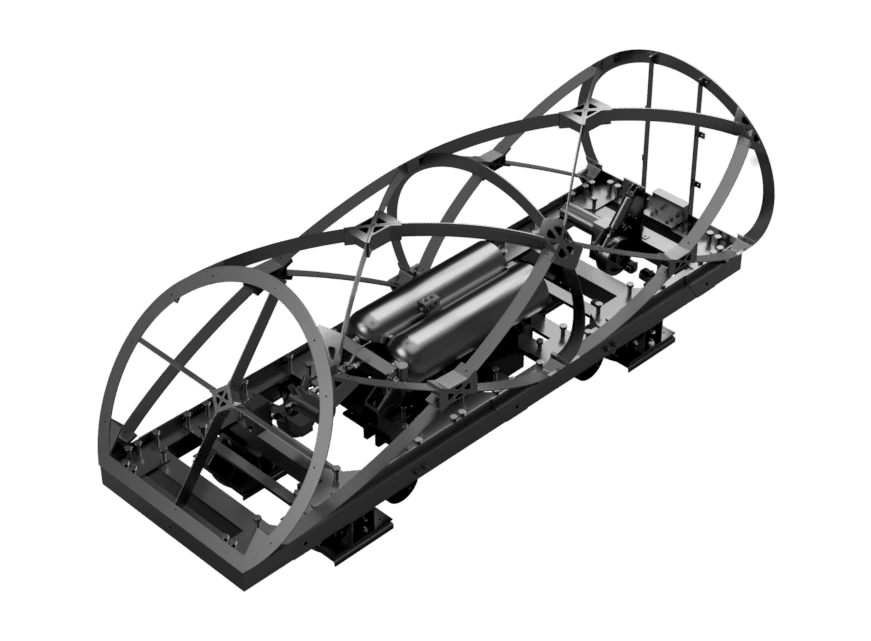
Frame and Shell
The frame and shell provide structures to support the motor, battery, and everything else onboard the pod. It needs to withstand hundreds of pounds of force in any direction and yet be extremely lightweight, reliable, and expandable.

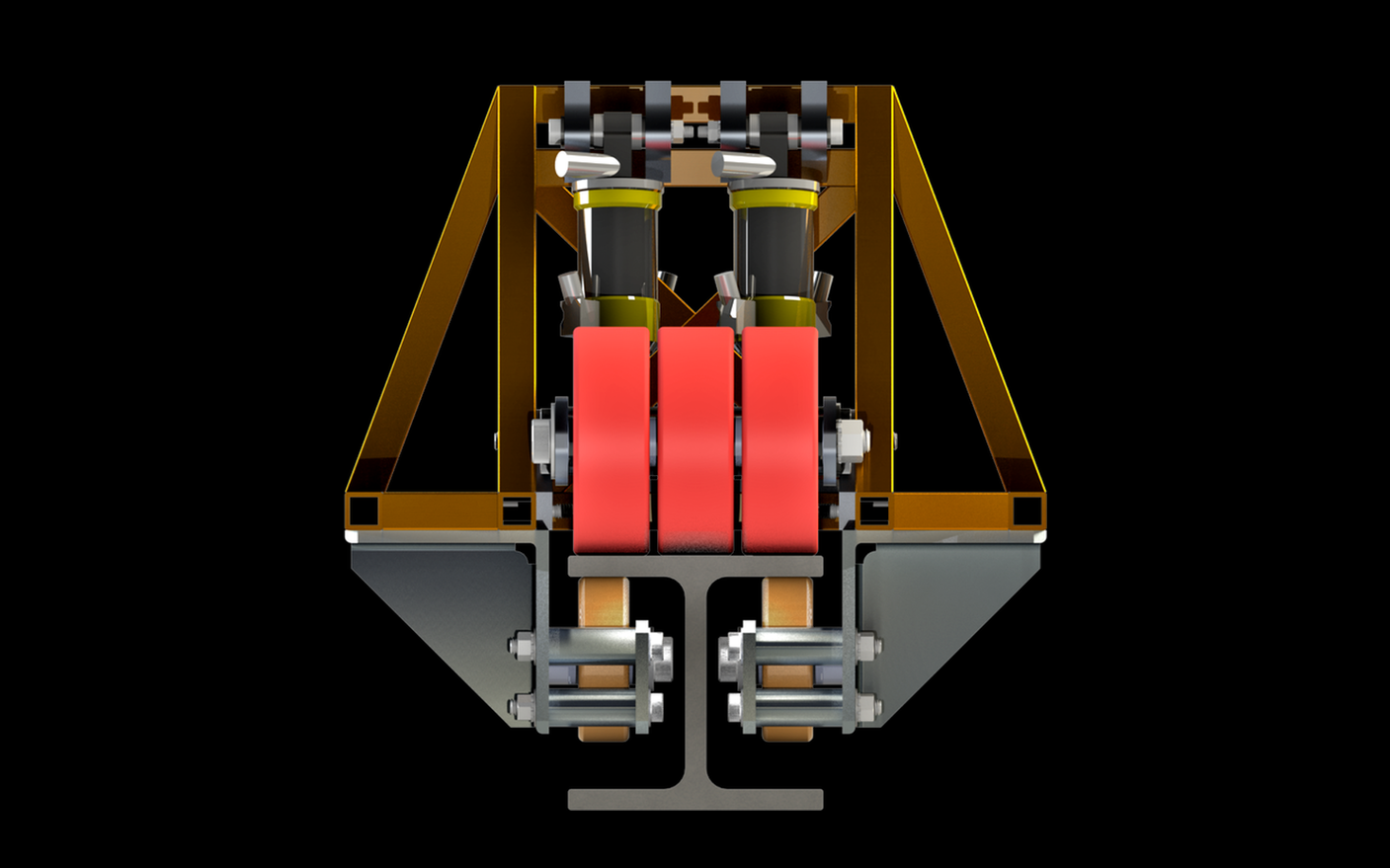
Guiding and Braking
Guidance and braking are failsafe mechanisms to control the pod's position and speed. Guidance wheels hold the LIM at a distance from the track measured in mere millimeters, and the mechanical brakes automatically actuate in the unlikely scenarios of loss of communications, electrical power, or pneumatic pressure.
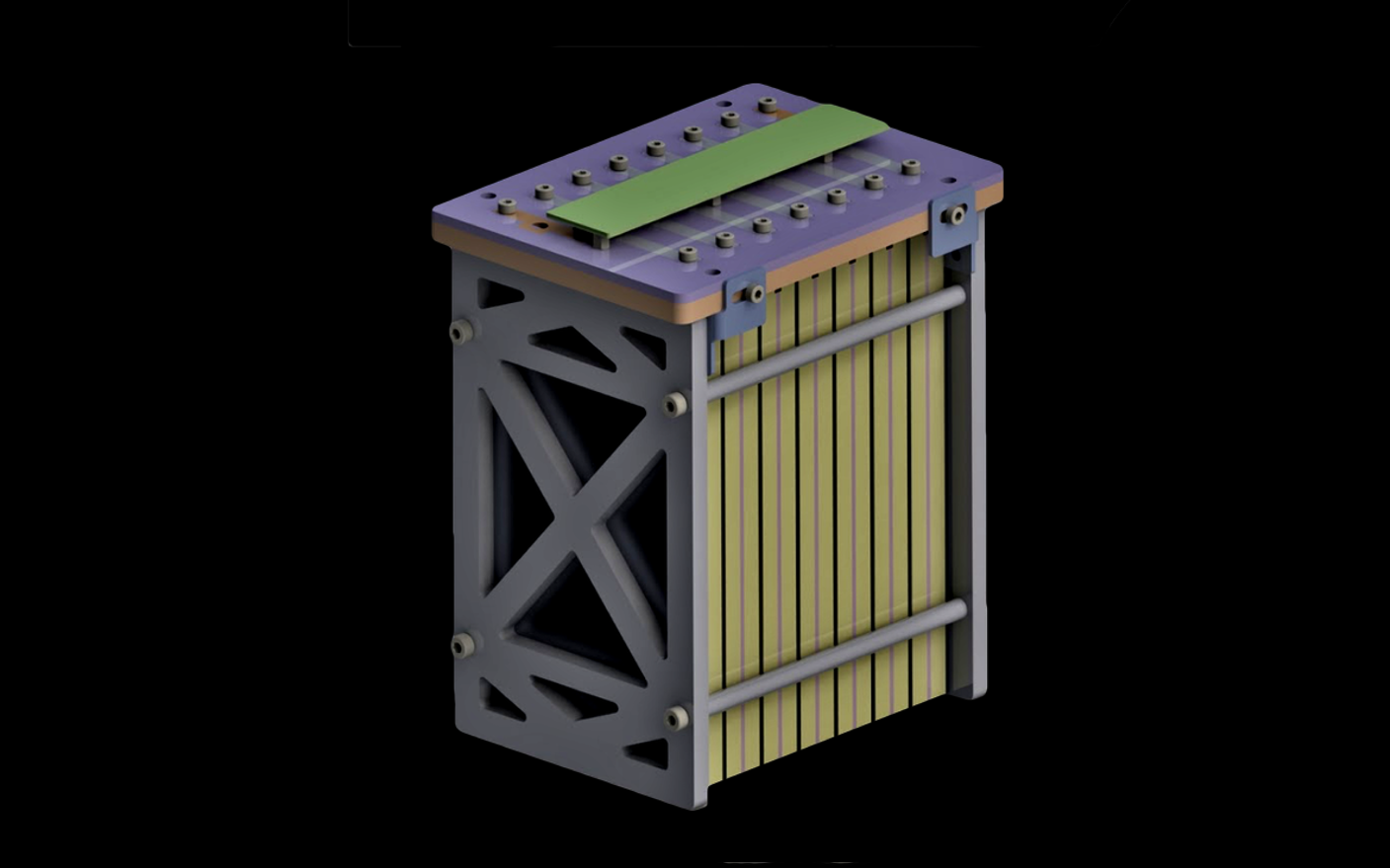
Motor Controller and Battery
Our high voltage power systems convert kilowatts of power from a carefully monitored lithium battery into three-phase power precisely modulated to maximize the linear induction motor's thrust.
Embedded Systems
The distributed flight computer aboard the pod implements realtime control algorithms for the power signals supplied to the LIM to allow efficient control at all speeds, and numerous sensors to analyze the performance and health of all subsystems. Our dashboard additionally gives us fine-grained, fail-safe control over everything the pod does during a test run.

Past Geese
 keyboard_arrow_right
keyboard_arrow_rightGoose I was the first pod we built! Fitted with huge air tanks and aircasters, it was the first pod in the competition to demonstrate pneumatic levitation, as in the original Hyperloop whitepaper. It also incorporates eddy current brakes, arranged as a Halbach array to maximize lateral magnetic fields. A sturdy aluminum and polycarbonate shell streamlined the pod aerodynamically.